AlgorimancerPG Photogrammetry and RangeFinder Application
Current Version 5.0 (August 2012)
The AlgorimancerPG application has lately added support for the navigation cameras (set A and set B) on the Curiosity rover, in addition to that of the Phoenix lander and MER rovers.
Only the MER rovers include support for camera orientation through the Pancam Tracking Database. This is not available for Curiosity or Phoenix. Currently there is no support for images from the high resolution Mastcam on Curiosity.
AlgorimancerPG is a Windows application (2000, XP, 7). The installation will add links to the application and associated documentation in Programs Menu; you may wish to add a shortcut to your desktop.
Download AlgorimancerPG Photogrammetry and Rangefinder Application
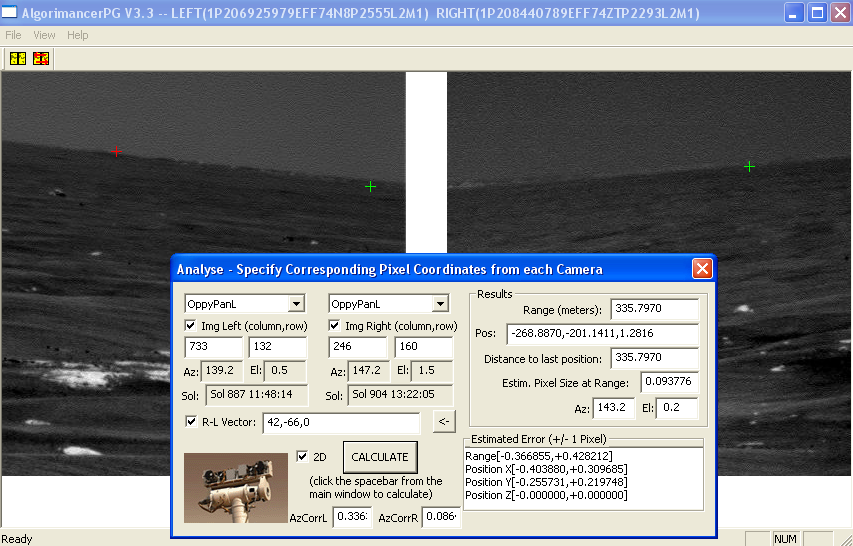
Screenshot:
To use AlgorimancerPG, start the application, open a stereo pair of images from either of the Curiosity rover (navcam only), MER rovers, or the Phoenix lander (use shift or control to select both images when opening), and ensure that the correct rover and camera is checked. You may manually enter pixel coordinates in the Analysis control and calculate results from those, however the Analysis control is linked to the images, so you can get the coordinates directly by simply clicking on the target location in each of the images using the LEFT mouse button. When you click on the image a red cross will mark the location, and the pixel coordinates will appear in the correct location in the Analysis control. Click left image, then right image, and click the Calculate button (or Spacebar) to find the resulting range and position information. After calculating, the red crosses will turn green, and these will accumulate in the images as you perform additional calculations.
The images initially appear with the upper left corners of each image synchronized with the upper left corner of the window region where it will display, with the image pixels the same size as the window pixels. You can zoom-in and out of the images (together) with the numeric keypad's +/- keys (or Page-up/Page-Down keys), and you can click and drag with the RIGHT mouse button to pan around the images (separately). If you need to revert to the starting condition there is a reset option under the View menu, along with an option to swap the left image with the right image in case they're reversed.
Enjoy. This remains a work in progress. Please let me know about any problems encountered.
For lot's of additional interesting information about the MER rovers engineering and science, visit the rovers' main site at JPL, or the MER section of UnmannedSpaceFlight.com. Additional images can be found at Exploratorium. To quickly capture lot's of pixel coordinates, the author recommends the free ImageJ application. To contact the author, you can reach him at algorimancer at gmail dot com, or as username algorimancer on Unmanned Space Flight dot com.
Images from the Curiosity rover may be downloaded from JPL .